Modos de transmisión.
Los sistemas de comunicaciones electrónicas pueden
diseñarse para manejar la transmisión solamente en una dirección, en ambas
direcciones pero sólo uno a la vez, o en ambas direcciones al mismo tiempo.
Estos se llaman modos de trasmisión. Cuatro modos de transmisión son
posibles: simplex, half-duplex, full-duplex y full/full-duplex.
v Simplex (SX)
Con
la operación simplex, las transmisiones pueden ocurrir sólo en una dirección.
Los sistemas simples son, algunas veces, llamados sistemas de un sentido, sólo
para recibir o sólo para trasmitir. Una ubicación puede ser un trasmisor o un
receptor, pero no ambos.
Un
ejemplo de la trasmisión simplex es la radiodifusión de la radio comercial o de
televisión; la estación de radio siempre trasmite y el usuario siempre recibe.
v
Half- duplex (SX)
Con
una operación Half-Duplex, las transmisiones pueden ocurrir en ambas
direcciones, pero no al mismo tiempo. A los sistemas half-duplex, algunas veces
se les llaman sistemas con alternativa de dos sentidos, cualquier sentido. Una
ubicación puede ser un trasmisor y un receptor, pero no los dos al mismo
tiempo.
Los
sistemas de radio de doble sentido que utilizan los botones oprima para hablar
(PTT), para operar sus transmisores, como lo son los radios de banda ciudana y
de trunking.
v
Full-duplex (FDX).
Con
una operación full-duplex, las transmisiones pueden ocurrir en ambas
direcciones al mismo tiempo. A los sistemas de full-duplex algunas veces se les
llama líneas simultáneas de doble sentido. Una ubicación puede transmitir y
recibir simultáneamente; sin embargo, la estación a la que está transmitiendo
también debe ser la estación de la cual está recibiendo.
Un
sistema telefónico celular estándar es un ejemplo de este tipo de trasmisión.
v
Full/full-duplex (F/FDX).
Con
una operación full/full-duplex, es posible transmitir y recibir
simultáneamente, pero no necesariamente entre las mismas dos ubicaciones (es
decir, una estación puede trasmitir a una segunda estación y recibir de una
tercera estación al mismo tiempo).
Las transmisiones full/full-duplex se utilizan casi
exclusivamente con circuitos de comunicaciones de datos.
MULTIPLEXACIÓN
Multiplexación por división en frecuencias
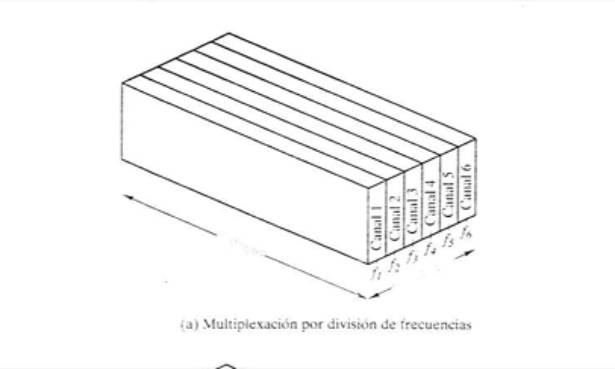
El uso de FDM es posible siempre
que el ancho de banda útil del medio de transmisión sea mayor que el ancho de
banda de la señal transmitida. Modulando cada señal con una frecuencia
portadora distinta se pueden transmitir simultáneamente varias señales; eso si,
las portadoras han de estar suficientemente separadas para que los distintos
anchos de banda no se solapen. En la siguiente figura se muestra un caso
general de FDM:
En este caso seis señales entran al multiplexor, que las modula con
distintas frecuencias (f1.... f6). Cada señal modulada necesita cierto ancho de banda, que se denomina canal
y que está centrado en torno a la correspondiente frecuencia portadora.
La señal compuesta que se transmite a través del medio es analógica.
Obsérvese, no obstante, que las señales de entrada pueden ser tanto analógicas
como digitales, en el caso de que la entrada sea digital, las señales de
entrada se deben pasar a través de modems para que se conviertan en analógicas.
Un ejemplo típico de FDM es la emisión de televisión convencional y
por cable.
En la siguiente figura se muestra un esquema general de un sistema
FDM.
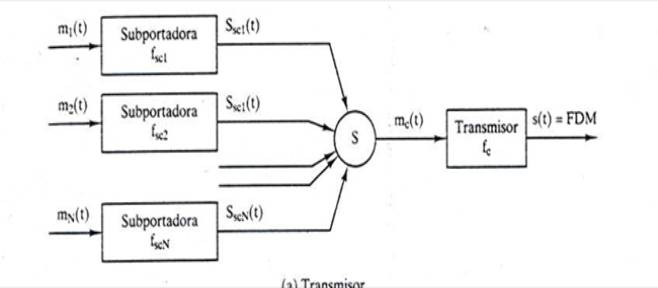
Se multiplexan una serie de señales analógicas o digitales [mi
(t) , i=1, N] sobre el mismo medio de transmisión. Cada una de las señales mi
(t) se modula sobre una portadora diferente, fsci , denominada
subportadora. Se puede usar cualquier tipo de modulación. Las señales
analógicas resultantes se suman dando lugar a la señal compuesta mc
(t).
En la siguiente figura se muestra el resultado:
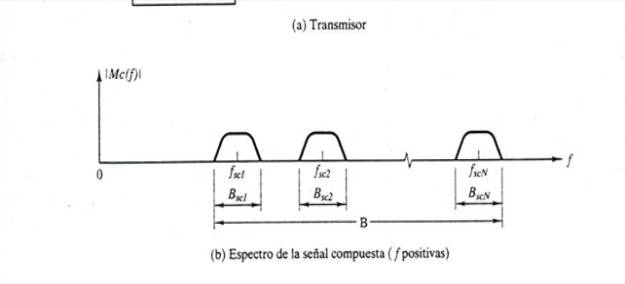
El espectro de la señal original se desplaza para centrarse en torno a
fsci. Se debe elegir de tal manera que no se solapen los anchos de
banda de las distintas señales.
En cualquier otro caso, sería imposible recuperar las señales
originales.
Multiplexión por division en el tiempo (TDM)
Es una
tecnología de banda base en la cual se identifican los circuitos individuales
(datos o voz) por su posición en un flujo de tramas que tiene intervalos
regulares de tiempo asignados. Se digitalizan las entradas analógicas (voz)
mediante la modulación por código de pulsos y parte de la información
digitalizadas se inserta dentro de los segmentos temporales de la transmisión.
Cada canal obtiene un segmento de tiempo entrelazado, de modo que todos los canales
comparten equitativamente el medio que se usa para la transmisión.
Una trama
es una secuencia de segmentos de tiempos en cada canal de entrada. Por ejemplo,
si hay 24 canales de entrada una trama consta de 24 segmentos que contienen
muestra de cada canal. Un bit de sincronización especial efectúa el seguimiento
de la trama, de modo que el equipo receptor puede mantener la correlación
temporal. Una trama nueva sigue con mas muestra de cada canal, y este proceso
continua a velocidades muy altas sobre el medio de transmisión.
En la
Multiplexación de tipo, una trama consta de 24 intervalos de tiempo y hay 8 mil
tramas por segundo. Cada ranura de tiempo o segmento de la trama contiene 64
mil Bits de información, lo que se obtiene mediante la Multiplexación de señal
analógica 800 veces por segundo y con el, uso de ocho bits por muestra (8000 x
8 = 64000 o 64Kbits/seg). El numero de bits por segundo soportado por una
facilidad de transmisión se llama velocidad de canal o velocidad de bits. Por
tanto un transmisión T1 tiene una velocidad de canal de 1,544 Mbips/seg ; lo
que se calcula como sigue:
24 tramas
x 64bits/trama = 1,536 Mbips/seg.
Se añade a
esto le bit se sincronización de trama que presenta a 8000 bits/seg (8 Kbps o
0,008 Mbps) para obtener la velocidad de transmisión final, como sigue:
1,536 Mbps
+ 0,008 Mbps = 1,544 Mbps
Proporciona
una forma de mezclar señales de varias fuentes como teléfonos, computadoras y
equipos de vídeo en único canal, para la comunicación sobre líneas telefónicas,
sistema de microondas o sistema de satélite.
El
canal se divide en ranuras de tiempo y se asigna a cada dispositivo una de
ellas para sus transmisiones la ranuras de tiempo se asignan de forma que cada
dispositivo que transmite obtenga una compartición igual, aunque algunos
dispositivos como los sistemas de videoconferencia pueden requerir mas ranuras
para asegurar que los datos lleguen a tiempo. Por ejemplo, se puede imaginar un
tren de furgones en el cual cada dispositivo que transmite obtiene uno de cada
cinco furgones en el extremo receptor el flujo de datos se demultiplexa la
señal de cada sistema se recombina y se envía al nodo destino en red o teléfono
de voz.
Ventajas de
la multiplexion de por divison de tiempo. (TDM)
1.- Los circuitos necesarios son digitales proporcionando
alta contabilidad y eficiencia de operación. Estos circuitos son mas simples
que los moduladores y demoduladores requeridos en los sistemas requeridos en
los sistema de multiplexion por división de frecuencia.
2.- La mutiplexion de muchos canales de datos ha
relativamente baja frecuencia se pueden llevar a cabo de manera muy eficiente
usando TDM si las entradas tienen ancho de banda comparables.
3.- Baja diafonia entre canales de vida a las no
linealidades de los amplificadores que manipulan las señales en el transmisor y
receptor. Estas no linealidades producen armónicos que afectan a los canales de
mayor frecuencia en los sistema FDM.
4.- En los sistemas TDM las señales de canales diferentes no
se manejan en forma simultanea, pero se les asigna diferentes intervalos de
tiempo. O sea que los requisitos de linealidad no se hacen más estrictos si se
aumenta él número de canales y los efectos de la distorsión se distribuyen de
manera equitativa entre todos ellos.
Desventajas del TDM
Incluye el hecho de que la precisión del pulso y el
desajuste del tiempo son un problema primordial a altas frecuencias, por lo
cual los sistemas TDM operen en general a frecuencias de reloj inferiores 100
Mhz. Además, se necesita sincronización entre el transmisor y el receptor
Los sistemas MIC, sistema de
codificación digital, utilizan la técnica MDT para cubrir la capacidad de los
medios de transmisión. La ley de formación de los sucesivos órdenes de
multiplexación responde a normalizaciones de carácter internacional, con vista
a facilitar las conexiones entre diversos países y la compatibilidad entre
equipos procedentes de distintos fabricantes.
El UIT/UIT recomienda, como primer
escalón de la jerarquía de multiplexación por división en el tiempo, 24 ó 32
(30 + 2) canales telefónicos, sistemas utilizados en Estados Unidos y Japón el
primero y en Europa, el segundo.
Según la recomendación G-732 del
UIT, el sistema MIC primario europeo multiplexa a nivel de muestra 30 canales
de voz, además de un canal de alineación y otro de señalización, formando una
trama de 256 bits (32 canales, una muestra por canal y 8 bits por muestra) a
una frecuencia de 8 Khz (doble ancho de banda que el canal telefónico), de lo
que resulta una velocidad de 2.048 kbps.
En los equipos múltiplex MIC
secundario, terciario, etc., se lleva a cabo una multiplexación en el tiempo
(MDT) por entrelazado de impulsos (bit a bit) a diferencia de los equipos MIC
primarios.
El UIT ha recomendado cuatro
jerarquías de multiplexación para equipos MIC. El equipo múltiplex digital que
combina las señales de salida de cuatro equipos múltiplex primarios MIC se
denomina equipo múltiplex digital de segundo orden. Los equipos múltiplex
digitales de tercer orden combinarían las señales de salida de cuatro equipos
múltiplex de segundo orden, etc.
Así, el segundo nivel de
multiplexación acepta cuatro señales digitales a 2.048 kbps para formar una
señal a 8.448 kbps. El tercer nivel agrupa cuatro señales de 8.448 kbps en una
de 34.368 kbps. El cuarto nivel agrupa cuatro señales de nivel tres en una
señal de 13.9264 kbps. Por último, en la misma proporción, el quinto nivel
produce una señal de 565 Mbps.
Multiplexación
por división en el tiempo síncrona
La multiplexación por división en el tiempo síncrona es posible cuando
la razón de datos a seguir (aveces denominada impropiamente ancho de banda) en
el medio es mayor que la razón de datos original de las señales a transmitir.
Se pueden transmitir varias señales digitales (o señales analógicas
que transporten datos digitales) en un único camino de transmisión mezclando en
el tiempo distintas porciones de las señales originales. La mezcla se puede
realizar bit a bit o en bloques.
En la siguiente figura se proporciona un esquema general de un sistema
TDM síncrono.
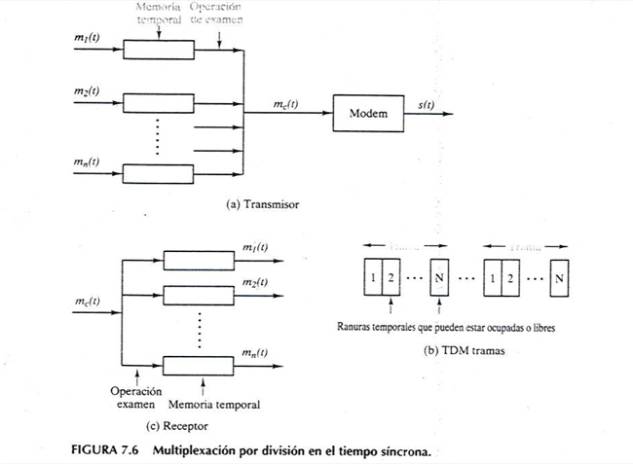
Se van a multiplexar una serie de señales [mi (t), i=1,...,
N] en el mismo medio de transmisión. Las señales transportan datos digitales y
son en general señales digitales.
Los datos de entrada provenientes de cada fuente se almacenan
temporalmente en una memoria temporal (“buffer”).
Cada memoria temporal tiene una longitud normalmente de un bit o un
carácter. Se realiza un exámen secuencial de las memorias temporales para
componer así la cadena de datos digitales mc (t), este exámen será
lo suficientemente rápido para que cada memoria temporal se vacíe antes de que
lleguen más datos.
La señal digital mc (t)
se puede transmitir directamente o se puede pasar a través de un modem de tal
forma que se transmita una señal analógica, en cualquier caso la transmisión es
síncrona.Los datos transmitidos deben tener un formato parecido al que se
muestra en la figura anterior en el inciso c.
Los datos se organizan en tramas.
Cada trama contiene un ciclo de subdivisiones o ranuras temporales. En cada
trama se dedican uno o más subdivisiones a cada una de las fuente. La secuencia
de subdivisiones que se dedica a una sola fuente, de trama en trama, se
denomina canal. La longitud de las subdivisiones es igual a la longitud de la
memoria temporal, típicamente un bit o un carácter.
Para fuentes asíncronas se utiliza
la técnica de mezcla de caracteres. Cada subdivisión temporal contendrá un
carácter de datos. Normalmente, antes
de la transmisión se eliminan los bits de comienzo y parada, los cuales
se reinsertan en el receptor, mejorando así la eficiencia.
La técnica de mezcla de bits se
usa con fuentes síncronas y también se puede usar en asíncronas.
La TDM síncrona se denomina así no
porque se use transmisión síncrona, sino porque las divisiones temporales se
preasignan de antemano a las distintas fuentes. Las subdivisiones temporales
asignadas a cada fuente se transmiten tanto si la fuente tiene datos como si
no.
Multiplexación
estadística por división en el tiempo
En un multiplexor por división en el tiempo síncrono, puede darse el
caso de que se pierdan muchas subdivisiones temporales dentro de una trama. Una
aplicación típica de la TDM síncrona consiste en enlazar una serie de
terminales en un puerto compartido del computador central. Incluso en el caso
de que todos los terminales se estén utilizando activamente, para uno dado, en
la mayor parte del tiempo no habrá transferencia de datos.
Una alternativa a la TDM síncrona es la TDM estadística, también
denominada TDM asíncrona o inteligente.
El multiplexor estadístico aprovecha la propiedad de cómo se generan
los datos asignando bajo demanda y dinámicamente las subdivisiones temporales.
Al igual que en TDM asíncrona, el multiplexor estadístico tiene una serie de
líneas de E/S por un lado y una línea multiplexada de velocidad mayor en el
otro.
Cada línea de E/S tiene asociada una memoria temporal. En el caso del
multiplexor estadístico, hay n líneas de E/S, pero sólo k, con k < n
subdivisiones temporales están disponibles en cada trama TDM.
En la entrada, el multiplexor sondea las memorias temporales de
entrada, cogiendo de éstas datos hasta que la trama esté completa, enviándola
posteriormente. En la salida, el multiplexor recibe la trama distribuyendo las
subdivisiones correspondientes a las memorias temporales de salida.
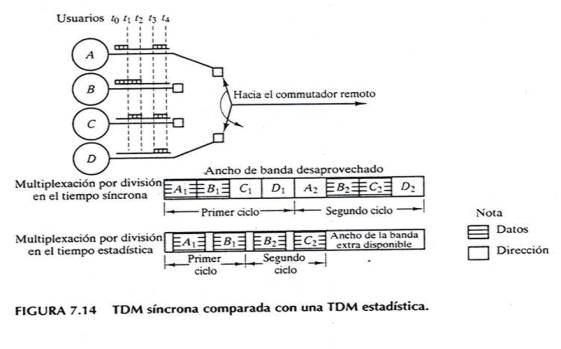
En la siguiente figura se comparan
los TDM estadísticos y síncronos.
Se consideran cuatro fuentes generadoras de datos, y se muestran los
datos generados en cuatro intervalos de tiempo (t0, t1, t2,
t3).
Para el multiplexor síncrono, se tiene una razón efectiva de datos de
salida cuatro veces superior a la razón de datos de cualquiera de los
dispositivos conectados.
Durante cada intervalo, los datos se colectan de las cuatro fuentes y
posteriormente se envían.
La estructura de la trama que se utilice en particular en un
multiplexor estadístico, tendrá una repercusión en las prestaciones finales del
mismo. En otras palabras, para mejorar la utilización es deseable minimizar el
número de bits suplementarios. En general, un sistema TDM estadístico utiliza
un protocolo síncrono.
Una manera de incrementar la eficiencia es permitir que varias fuentes
de datos se empaqueten en una única trama. En este caso, se necesitará algún
procedimiento para especificar la longitud de datos para cada una de las
fuentes. Por tanto, la subtrama TDM estadística consiste en una secuencia de
campos de datos, cada uno de ellos etiquetado con una dirección y una longitud.
Se pueden todavía utilizar otras técnicas para hacer esta aproximación
aún más eficiente. El campo de direcciones se puede reducir utilizando un
direccionamiento relativo. Es decir, cada dirección especificará el número de
la fuente actual relativa a la anterior, módulo el número total de fuentes.
Entonces, por ejemplo, en lugar de utilizar un campo de direcciones de
8 bits, puede ser suficiente uno de 4 bits.
Prestaciones
Ya se ha mencionado que la velocidad de salida en un multiplexor
estadístico es menor que la suma de las velocidades de las entradas. Esto está permitido dado que se supone que
la cantidad media de entrada es menor que la capacidad de la línea
multiplexada. El problema de este enfoque
es que, aunque la entrada conjunta promedio puede ser menor que la capacidad de
la línea multiplexada, puede haber periodos pico en los que la entrada exceda
la capacidad.
La solución a este problema consiste en incluir una memoria temporal
en el multiplexor para almacenar temporalmente el exceso de datos de
entrada. En la Tabla 8.6 se da un
ejemplo del comportamiento de este tipo de sistemas. Se suponen 10 fuentes, cada una de ellas con una capacidad de
1.000 bps, y que la entrada media por fuente es el 50 % del máximo. Así, en promedio, la carga de entrada es
5.000 bps. Se consideran dos casos:
multiplexores con capacidad de salida de 5.000 bps y de 7.000 bps. Las entradas en la tabla mencionada muestran
el número de bits de entrada procedentes de cada uno de los 10 dispositivos por
cada milisegundo y la salida del multiplexor.
Cuando la entrada excede la salida, el exceso se debe almacenar
temporalmente.
Tabla 8.6. Ejemplo de las prestaciones de un multiplexor
estadístico.
|
|
Capacidad
= 5.000 bps |
Capacidad
= 7.000 bps |
||
|
Entrada |
Salida |
Exceso |
Salida |
Exceso |
|
6 |
5 |
1 |
6 |
0 |
|
9 |
5 |
5 |
7 |
2 |
|
3 |
5 |
5 |
5 |
0 |
|
7 |
5 |
5 |
7 |
0 |
|
2 |
5 |
2 |
2 |
0 |
|
2 |
4 |
0 |
2 |
0 |
|
2 |
2 |
0 |
2 |
0 |
|
3 |
3 |
0 |
3 |
0 |
|
4 |
4 |
0 |
4 |
0 |
|
6 |
5 |
1 |
6 |
0 |
|
1 |
2 |
0 |
1 |
0 |
|
10 |
5 |
5 |
7 |
3 |
|
7 |
5 |
7 |
7 |
3 |
|
5 |
5 |
7 |
7 |
1 |
|
8 |
5 |
10 |
7 |
2 |
|
3 |
5 |
8 |
5 |
0 |
|
6 |
5 |
9 |
6 |
0 |
|
2 |
5 |
6 |
2 |
0 |
|
9 |
5 |
10 |
7 |
2 |
|
5 |
5 |
10 |
7 |
0 |
Existe un compromiso entre el tamaño de la memoria temporal usada y la
velocidad de la línea. Sería deseable
usar tanto la memoria como la velocidad menores posibles, pero una reducción en
uno de estos parámetros requiere el incremento del otro. El deseo de reducir el tamaño de la memoria
temporal se debe al hecho de que a más cantidad de memoria mayor es el
retardo. Por tanto, el compromiso real
está entre el tiempo de respuesta del sistema, y la velocidad de la línea
multiplexada.
Algunas medidas aproximadas para evaluar este compromiso.
Definamos los siguientes parámetros para un multiplexor por división
en el tiempo estadístico:
I = número de fuentes de entrada
R = velocidad de cada fuente, en bps
M = capacidad efectiva de la línea multiplexada, en bps
µ = fracción media de tiempo que transmite cada
fuente., 0 < a < 1
K = M / IR = razón. entre la capacidad de la línea multiplexada y la
entrada máxima total.
Se pueden obtener algunos resultados considerando al multiplexor como
una cola atendida por un solo servidor.
Se alcanza una situación de cola cuando un servicio recibe un «cliente»
y, al encontrarlo ocupado, tiene que esperar.
El retardo sufrido por el cliente de un servicio es el tiempo de espera
en la cola más el tiempo de servicio.
El retardo depende del patrón de tráfico de llegada y de las
características del servidor. Este modelo se puede relacionar fácilmente con el
multiplexor estadístico:
l = µIR
Ts = 1 / M
r = lTs = µIR / M = µ / K = l / M
Colas de un único servidor con tiempos de servicio constantes y distribución
de llegadas de tipo poisson (aleatorias):
Parámetros
l =
número medio de llegadas por segundo
Ts = tiempo de servicio para
cada llegada
r = utilización; fracción de tiempo que está
ocupado el servidor
N = número medio de «clientes» en el sistema (en espera y siendo
servidos)
Tr = tiempo de estancia; tiempo
medio que un «cliente» pasa en el sistema (en espera y siendo servido)
sr = desviación estándar de Tr
Fórmulas
r = lTs
N = r²
+ r
2(1-r)
Tr = Ts(2-r)
2(1-r)
sr = 1 (r - 3r²/2 + 5r³/6 - r^4/12)^½
1-r
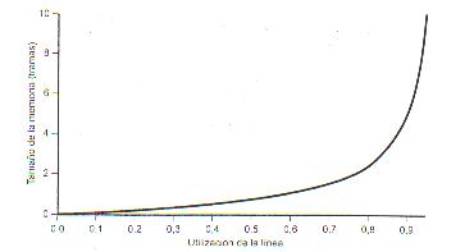
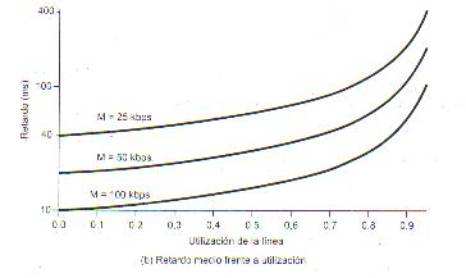
Figura 8.16. Tamaño de la
memoria temporal y retardo para un multiplexor estadístico.
La Figura 8.16 puede aclarar conceptualmente el compromiso entre el
tiempo de respuesta del sistema y la velocidad de la línea multiplexada. En la parte (a) el número medio de tramas
que se deben almacenar temporalmente en función de la utilización media de la
línea multiplexada. En la parte (b) el retardo medio experimentado por una
trama en función de la utilización y de la velocidad de datos. Se observa que a medida que crece la
utilización lo hacen también los requisitos de almacenamiento temporal y el
retardo. Resulta claramente no deseable una utilización por encima del 80 %.
Obsérvese que el tamaño promedio para la memoria temporal sólo depende
de r, y no directamente de M. Por
ejemplo, considérense los dos siguientes casos:
Codificación variable. Multiplexación
La clase Multiplexor se
encarga de la codificación variable. En la clase Diferencia se declara como una
clase amiga:
En la recomendación se incluyen todos los códigos de longitud variable
correspondientes a la información a enviar. Estos códigos se almacenan en
tablas incluidas en la unidad multiplexor.cpp,
excepto los correspondientes a los códigos de los coeficientes transformados,
que por ser especialmente larga se almacena en el disco, el el fichero coeft.dat. Estas tablas están compuestas
por elementos de la forma
struct DATO { unsigned long int dato; unsigned char n_bits;};
Es decir, cada dato almacena un
valor, y el número de bits con el que se codifica. Así, por ejemplo, al código
011 le correspondería un valor de {3,3}, y al 10100 un valor {20,5}. De esta forma,
a la hora de introducir la información en el buffer de transmisión, el
multiplexor simplemente tiene que buscar en las tablas el dato correspondiente
a la información a enviar. En el múltiplex se introduce también información del
macrobloque, bloque y grupo de bloques enviado. Por ejemplo, dentro de un
macrobloque, se genera un número con la siguiente ecuación4.12:
donde ![]() si
hay coeficientes para el bloque correspondiente según la numeración de la
figura 1.6, y 0 en otro caso. Es
decir,
si
hay coeficientes para el bloque correspondiente según la numeración de la
figura 1.6, y 0 en otro caso. Es
decir, ![]() se
correspondería con que exista información en todos los bloques, y
se
correspondería con que exista información en todos los bloques, y ![]() se
corresponde un macrobloque con información de lumiancia en sus cuatro bloques,
pero sin información de crominancia. Pues bien, el código correspondiente a
se
corresponde un macrobloque con información de lumiancia en sus cuatro bloques,
pero sin información de crominancia. Pues bien, el código correspondiente a ![]() es
es
![]() 4.13,
y se accederá a esta información a través de la posición 60 de la tabla EBC,
que es un vector de estructuras dato. Es decir,
4.13,
y se accederá a esta información a través de la posición 60 de la tabla EBC,
que es un vector de estructuras dato. Es decir,
EBC[ 60 ].dato = 7;EBC[ 60 ].n_bits = 3;
De esta forma resolvemos de una manera simple el
problema de enviar al búffer de transmisión un código variable, puesto que
podemos buscar fácilmente tanto el dato a enviar como el número de bits que le
corresponden. En el siguiente capítulo explicamos cómo funciona el búffer de
transmisión, y cómo se emplea la información almacenada en estas tablas a la
hora de enviar los datos.