CÓDIGOS DE TRANSMISIÓN Y DETECCIÓN DE ERRORES
Modos de Transmisión
Esencialmente,
hay cuatro modos de transmisión para los circuitos de comunicación de datos:
simples, half duplex, full y full duplex.
Simplex.- Con la operación simplex, la transmisión de datos no se
puede dirigir; la información se puede enviar sólo en una dirección. Las líneas
simples, también se llaman líneas sólo para recibir, sólo para transmitir o de
un solo sentido. La televisión comercial y sistemas de radio son ejemplos de
transmisión simples.
Half duplex (HDX).- En el modo
half duplex, la transmisión de datos es posible en ambas direcciones, pero no
al mismo tiempo. Las líneas half duplex también se llaman de dos sentidos
alternados o líneas de cualquier sentido. La banda civil (CB), es un ejemplo de
transmisión half duplex.
Full Duplex (FDX).- En el modo de
full duplex las transmisiones son posibles en ambas direcciones
simultáneamente, pero deben estar las mismas dos estaciones. Las líneas de full
duplex, también se llaman de dos sentidos simultáneas, duplex o líneas de dos
sentidos. Un sistema telefónico estándar es un ejemplo de la transmisión de
full duplex.
Full/ full duplex (F/FDX).- En el modo
F/FDX, la transmisión es posible en ambas direcciones al mismo tiempo, pero no
entre las mismas dos estaciones (es decir, una estación está transmitiendo a
una segunda estación y recibiendo de una tercera estación, al mismo tiempo).
F/FDX es posible sólo en los circuitos de multipunto. El sistema postal de EUA,
es un ejemplo de una transmisión full/full duplex.
Operación de dos hilos contra
cuatro hilos.
Dos
hilos, como el nombre lo indica, envuelve un medio de transmisión que utiliza
dos líneas de cable (una señal y una de referencia) o una configuración que es
equivalente a tener sólo dos líneas de cable. Con la operación a dos hilos, es
posible la transmisión simplex, half duplex o full duplex. Para la operación
full duplex, las señales se propagan en direcciones opuestas, deben ocupar
diferentes anchos de banda; de otra manera, se mezclarán en forma lineal y
tendrán interferencia una con otra.
Cuatro hilos, como el nombre lo indica, involucra un medio de transmisión que
usa cuatro cables (dos se usan para las señales que se están propagando en
direcciones opuestas y dos se usan como referencia) o una configuración que es
equivalente a tener cuatro cables. Con la operación a cuatro hilos las señales
se propagan en direcciones opuestas, están físicamente separadas y, por lo
tanto, pueden ocupar los mismos anchos de banda sin interferir una con otra. La
operación a cuatro hilos proporciona más aislamiento y se prefiere sobre la de
dos hilos, aunque la de cuatro hilos requiere el doble de cables y,
consecuentemente, el costo es doble.
Un
transmisor y su receptor asociado son equivalentes a un circuito de dos hilos.
Un
transmisor y un receptor para ambas direcciones de propagación es equivalente a
un circuito a cuatro hilos. Con la transmisión
y full duplex sobre una línea de dos hilos, el ancho de banda disponible
debe dividirse a la mitad del valor del half duplex. Consecuentemente, la
operación de full duplex sobre dos hilos requiere el doble del tiempo para
transferir la misma cantidad de información.
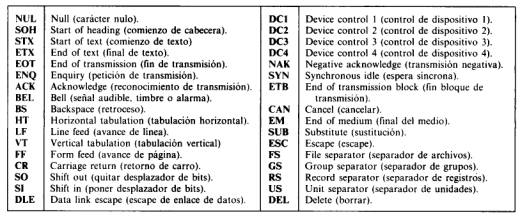
Códigos de Comunicación de Datos.
Los
códigos de comunicación de datos son secuencias de bit prescritas, usadas para
codificar caracteres y símbolos. Consecuentemente, los códigos de comunicación
de datos frecuentemente se llaman conjuntos de caracteres, códigos de
caracteres, códigos de símbolo, o lenguaje de caracteres. Esencialmente,
existen sólo tres tipos de caracteres usados en los códigos de comunicación de
datos: caracteres de control de enlace de datos, los cuales se usan para
facilitar el flujo ordenado de información, de una fuente a un destino;
caracteres de control gráfico, lo cual involucra la síntesis o presentación de
la información en la terminal de recepción, y caracteres alfa/numéricos, los
cuales se usan para representar los múltiples símbolos usados para letras,
números y puntuación en el lenguaje inglés.
El
primer código de comunicaciones de datos, que tuvo un uso amplio, fue el código
Morse. El código Morse usaba tres símbolos de longitud desigual (punto, guión y
espacio), para codificar caracteres alfa/numéricos, signos de puntuación y una palabra de interrogación.
El
código Morse es inadecuado, para usar en equipos de computadoras digitales
modernas, porque todos los caracteres no tienen el mismo número de símbolos o
requerimientos de la misma cantidad de tiempo en ser enviados y cada operador
del código Morse transmite el código a una velocidad diferente. Además, con el
código Morse, hay una selección insuficiente de caracteres de control gráficos
y de enlace de control para facilitar la transmisión y presentación de los dats
normalmente usados en las aplicaciones de computadora contemporáneas.
Los tres conjuntos de caracteres, más comunes, actualmente usados para la codificación de caracteres son: el código Buadot, el código Estándar Americano para el Intercambio de Información (ASCII) y el código de Intercambio de Decimal Codificado en Binario Extendido (EBCDIC).
Código Baudot (a veces llamado código Telex ).- Fue el
primer código de caracteres de tamaño fijo. El código Baudot fue desarrollado
por un ingeniero postal francés, Thomas Murray, en 1875 y nombrado después
Emilie Baudot, un pionero en la impresión telegráfica. El código Baudot es un
código de caracteres de 5 bits que se usa principalmente para equipo de
teletipo de baja velocidad, tal como el sistema TWX/Telex . Con el código de 5
bits existen sólo 25 o 32 combinaciones posibles, lo cual es insuficiente para
representar las 26 letras del alfabeto, los 10 dígitos y los diversos signos de
puntuación, así como caracteres de control. Por lo tanto, el código Baudot usa
caracteres de cambio de posición de letra, para expandir su capacidad a 58
caracteres. La última versión del código Baudot está recomendada por la CCITT
como el Alfabeto Internacional No. 2 . El código Baudot, aún lo usa la Western
Union Company para el TWX y los sistemas de teletipo Telex . Los servicios de noticias, AP y UPI, por
muchos años usaron el código Baudot para enviar la información de noticias a
todo el mundo. La versión más reciente del código Baudot se muestra en la siguiente tabla.
Código Baudot
|
Desplazamiento de |
|
|
|
|
|
|
|
||
|
Carácter |
|
Código Binario |
|||||||
|
Letra |
Figura |
|
|
Bit |
4 |
3 |
2 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
A |
- |
|
|
|
1 |
1 |
0 |
0 |
0 |
|
B |
? |
|
|
|
1 |
0 |
0 |
1 |
1 |
|
C |
: |
|
|
|
0 |
1 |
1 |
1 |
0 |
|
D |
$ |
|
|
|
1 |
0 |
0 |
1 |
0 |
|
E |
3 |
|
|
|
1 |
0 |
0 |
0 |
0 |
|
F |
! |
|
|
|
1 |
0 |
1 |
1 |
0 |
|
G |
& |
|
|
|
0 |
1 |
0 |
1 |
1 |
|
H |
# |
|
|
|
0 |
0 |
1 |
0 |
1 |
|
I |
8 |
|
|
|
0 |
1 |
1 |
0 |
0 |
|
J |
‘ |
|
|
|
1 |
1 |
0 |
1 |
0 |
|
K |
( |
|
|
|
1 |
1 |
1 |
1 |
0 |
|
L |
) |
|
|
|
0 |
1 |
0 |
0 |
1 |
|
M |
. |
|
|
|
0 |
0 |
1 |
1 |
1 |
|
N |
, |
|
|
|
0 |
0 |
1 |
1 |
0 |
|
O |
9 |
|
|
|
0 |
0 |
0 |
1 |
1 |
|
P |
0 |
|
|
|
0 |
1 |
1 |
0 |
1 |
|
Q |
1 |
|
|
|
1 |
1 |
1 |
0 |
1 |
|
R |
4 |
|
|
|
0 |
1 |
0 |
1 |
0 |
|
S |
bel |
|
|
|
1 |
0 |
1 |
0 |
0 |
|
T |
5 |
|
|
|
0 |
0 |
0 |
0 |
1 |
|
U |
7 |
|
|
|
1 |
1 |
1 |
0 |
0 |
|
V |
; |
|
|
|
0 |
1 |
1 |
1 |
1 |
|
W |
2 |
|
|
|
1 |
1 |
0 |
0 |
1 |
|
X |
/ |
|
|
|
1 |
0 |
1 |
1 |
1 |
|
Y |
6 |
|
|
|
1 |
0 |
1 |
0 |
1 |
|
Z |
“ |
|
|
|
1 |
0 |
0 |
0 |
1 |
|
Desplazamiento de
la figura |
1 |
1 |
1 |
1 |
1 |
||||
|
Desplazamiento de
la letra |
1 |
1 |
0 |
1 |
1 |
||||
|
Espacio |
0 |
0 |
1 |
0 |
0 |
||||
|
Alimentación de
línea (LF) |
0 |
1 |
0 |
0 |
0 |
||||
|
Blanco (nulo) |
0 |
0 |
0 |
0 |
0 |
||||
Código ASCII.- En
1963, en un esfuerzo por estandarizar los códigos de comunicaciones de datos,
Estados Unidos adoptó el código de teletipo modelo 33, del Sistema Bell, como
el Código de Información Estándar de Estados Unidos de América (USAASCII),
mejor conocido, simplemente como ASCII-63. Desde su adopción, ASCII ha progresado
genéricamente por las versiones de 1965, 1967 y 1977, con la versión de 1977
recomendada por la CCITT como el Alfabeto Internacional No.5. ASCII es un conjunto de caracteres de 7 bits
que tiene 2 EXP 7 o 128 combinaciones. Con ASCII, el bit menos significativo
(LSB) se designa como b(0) y el bit más significativo (MSB) se designa como
b(6). El b(7) no es parte del código ASCII, pero generalmente se reserva para
el bit de paridad. En realidad, con cualquier conjunto de caracteres, todos los
bits son igualmente importantes, porque el código no representa un número
binario con más peso. Es común con los códigos de caracteres referirse a bits
por su orden; b(0) es el bit orden cero, b(1) es el bit de primer orden,
etcétera. Con la transmisión serial,
el bit transmitido primero se llama LSB. Con ASCII, el bit de orden bajo b(0),
es el LSB y se transmite primero. El ASCII es probablemente el código más
frecuentemente usado hoy en día. La versión de 1977 del código ASCII se muestra
en la siguiente tabla.
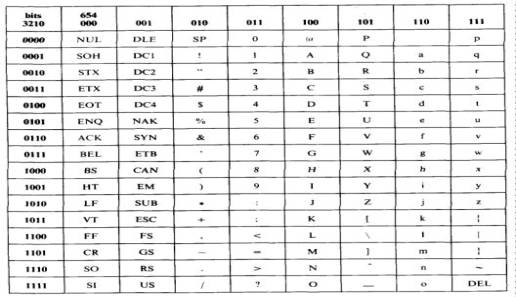
Código
ASCII
Todas
sus posibilidades son usadas, dividiéndose en: caracteres de control,
caracteres especiales, letras mayúsculas, letras minúsculas, números.
NRZ(Non Return to
Zero).- No Retorno a cero, utiliza un nivel diferente de tensión para
cada uno de los dos dígitos binarios. Tiene la propiedad de que el nivel de
tensión se mantiene constante durante la duración del BIT; es decir, no hay
transiciones (no hay retorno al nivel cero de tensión). Por ejemplo, la ausencia de tensión se puede
usar para representar un 0 binario, mientras que un nivel constante y positivo
de tensión puede representar al 1. Aunque es mas común usar un nivel negativo
para representar un valor binario y una tensión positiva para representar al
otro. Es el esquema más sencillo ya que se codifica un nivel de tensión como un
1 y una ausencia de tensión como un 0 ( o al revés ) .
Ventajas : sencillez , fácil de implementar , uso
eficaz del ancho de banda .
Desventajas : presencia de componente en continua ,
ausencia de capacidad de sincronización.
Se suelen utilizar en grabaciones magnéticas .
Otra modalidad de este tipo de codificación es la
NRZI que consiste en codificar los bits cuando se producen cambios de tensión (
sabiendo la duración de un BIT , si hay un cambio de tensión , esto se codifica
por ejemplo como 1 y si no hay cambio , se codifica como 0 ) . A esto se le
llama codificación diferencial . Lo que se hace es comparar la polaridad de los
elementos de señal adyacentes , y esto hace posible detectar mejor la presencia
de ruido y es más difícil perder la polaridad de una señal cuando hay
dificultades de transmisión .
NRZ-L (No Return to Zero - Level).- Nivel no retorno a cero se usa
generalmente para generar o interpretar los datos binarios en las terminales y
otros dispositivos.
NRZI (No Return to Zero, invert on ones).- Al igual que NRZ-L, mantiene constante el
nivel de tensión durante la duración de un BIT. Los datos se codifican mediante
la presencia o ausencia de una transición de la señal al principio del intervalo
de duración del BIT. Un1 se codifica mediante la transición (bajo a alto o alto
a bajo) al principio del intervalo de señalización, mientras que un 0 se
representa por la ausencia de transición. NRZI es un ejemplo de codificación diferencial, en la cual la
codificación de cada BIT se hace de la siguiente manera: si se trata del valor
binario 0, se codifica con la misma señal que el BIT anterior, si se trata de
un valor binario 1, entonces se codifica con una señal diferente que la
utilizada para el BIT precedente. Una ventaja es que en un sistema complicado
de transmisión, no es difícil perder la polaridad de la señal. Por ejemplo, en
una línea de par trenzado, si los cables se invierten accidentalmente, todos
los 1y 0 en el NRZ - L se invitarán. Esto no pasa en un esquema diferencial.
Los códigos NRZ son los más fáciles de implementar y
además se caracterizan por hacer un uso eficaz del ancho de banda.
Manchester .- En la codificación Manchester, cada período de un
BIT se divide en dos intervalos iguales. Un BIT binario de valor 1 se transmite
con valor de tensión alto en el primer intervalo y un valor bajo en el segundo.
Un BIT 0 se envía al contrario, es decir, una tensión baja seguida de un nivel
de tensión alto. Este esquema asegura
que todos los bits presentan una transición en la parte media, proporcionando
así un excelente sincronismo entre el receptor y el transmisor. Una desventaja
de este tipo de transmisión es que se necesita el doble del ancho de banda para
la misma información que el método convencional.
Manchester Diferencial.-
Combinación de sincronización y datos. Este
mecanismo de señalización binaria combina datos y pulsos de sincronización en
“símbolos de bits”. Cada símbolos de BIT es separado en dos mitades,
conteniendo la segunda mitad el inverso binario de la primera mitad. Siempre
tiene lugar una transición en medio de cada símbolo de BIT. Se codifica un
“espacio” como una repetición del símbolo de BIT anterior, generando de ese
modo una transición tanto al comienzo como en el medio del símbolo de BIT. Se
codifica una “marca” como el inverso del símbolo de BIT anterior, generando de
ese modo una transición sólo en el medio.
La codificación diferencial Manchester es una variación puesto que en
ella, un bit de valor 1 se indica por la ausencia de transición al inicio del
intervalo, mientras que un bit 0 se indica por la presencia de una transición
en el inicio, existiendo siempre una transición en el centro del intervalo. El
esquema diferencial requiere un equipo más sofisticado, pero ofrece una mayor
inmunidad al ruido. El Manchester Diferencial tiene como ventajas adicionales
las derivadas de la utilización de una aproximación diferencial.
Todas las técnicas bifase fuerzan al menos una
transición por cada BIT pudiendo tener hasta dos en ese mismos periodo. Por
tanto, la máxima velocidad de modulación es el doble que en los NRZ, esto
significa que el ancho de banda necesario es mayor. No obstante, los
esquemas bifase tienen varias ventajas:
Definición de los formatos de
codificación digital de señales
|
No retorno a cero (NRZ-L)
|
0 = nivel alto
|
1 = nivel bajo
|
No retorno a cero invertido (NRZI)
|
0 = no hay transición al comienzo del intervalo
(un bit cada vez)
|
1 = transición al comienzo del intervalo
|
Bipolar AMI
|
0 = no hay señal
|
1 = nivel positivo o negativo alternante
|
Manchester
|
0 = transición de alto a bajo en mitad del
intervalo
|
1 = transición de bajo a alto en mitad del
intervalo
|
Manchester Diferencial
|
Siempre hay una transición en mitad del intervalo
|
0 = transición al principio del intervalo
|
1 = no hay transición al principio del intervalo
|
Caracteres de
Control
Código EBCDIC.- EBCDIC es
un código de caracteres de 8 bits, desarrollado por IBM y se usa, extensamente,
en IBM y equipo compatible con IBM. Con 8 bits, son posibles 2 EXP 8 o 256
combinaciones, haciendo que EBCDIC sea el conjunto de caracteres más poderoso.
Observe que con EBCDIC el LSB se designa como b(7) y el MSB se designa como
b(0). Por lo tanto, transmite al final. El código EBCDIC no facilita el uso de
bit de paridad. El código EBCDIC se muestra en la siguiente tabla.
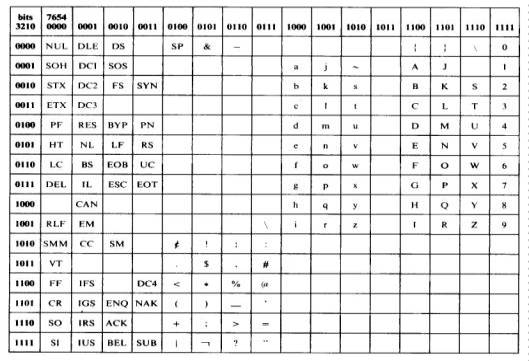
Código EBCDIC
Letras mayúsculas de la A a la Z: se dividen en tres
grupos (A-I), (J-R), (S-Z) y en las primeras cuatro posiciones se identifica el
grupo al cual pertenece la letra y en las restantes cuatro posiciones el dígito
correspondiente a la posición de la letra en el grupo.
La letra Ñ se representa 0 1 1 0 1 0 0 1
Los dígitos del cero (0) al nueve (9): se
identifican con un uno en las primeras cuatro posiciones y en las restantes
cuatro posiciones el dígito en binario.
Datos y señales digitales
Una señal es digital si consiste en una serie de
pulsos de tensión . Para datos digitales no hay más que codificar cada pulso
como BIT de datos .
En una señal unipolar ( tensión siempre del mismo
signo ) habrá que codificar un 0 como una tensión baja y un 1 como una tensión
alta ( o al revés ) .
En una señal bipolar ( positiva y negativa ) , se
codifica un 1 como una tensión positiva y un 0 como negativa ( o al revés ) .
La razón de datos de una señal es la velocidad de
transmisión expresada en bits por segundo , a la que se transmiten los datos .
La razón de modulación es la velocidad con la que
cambia el nivel de la señal , y depende del esquema de codificación elegido .
Un aumento de la razón de datos aumentará la razón
la tasa de error por BIT.
Un aumento del ancho de banda permite un aumento en
la razón de datos de error por BIT.
Un aumento de la relación señal-ruido ( S/N ) reduce
Para mejorar las prestaciones del sistema de transmisión , se debe utilizar un
buen esquema de codificación , que establece una correspondencia entre los bits
de los datos y los elementos de señal .
Factores a tener en cuenta para utilizar un buen
sistema de codificación :
1. Espectro de la señal : La ausencia de componentes
de altas frecuencias , disminuye el ancho de banda . La presencia de componente
continua en la señal obliga a mantener una conexión física directa ( propensa a
algunas interferencias ) . Se debe concentrar la energía de la señal en el
centro de la banda para que las interferencias sean las menores posibles .
2. Sincronización : para separar un bit de otro , se
puede utilizar una señal separada de reloj ( lo cuál es muy costoso y lento ) o
bien que la propia señal porte la sincronización , lo cuál implica un sistema
de codificación adecuado .
3. Detección de errores : es necesaria la detección
de errores ya en la capa física .
4. Inmunidad al ruido e interferencias : hay códigos
más robustos al ruido que otros .
5. Coste y complejidad : el coste aumenta con el
aumento de la razón de elementos de señal .
Códigos de corrección de errores.
Los
diseñadores de redes han desarrollado dos estrategias básicas para manejar los
errores. Una es incluir suficiente información redundante en cada bloque de
datos transmitido para que el receptor pueda deducir lo que debió sel el
carácter transmitido. La otra estratégia es incluir sólo suficiente redundancia
para que el receptor sepa que ha ocurrido un error (pero no qué error) y
entonces solicite una retransmisión. La primera estrategia usa códigos de
corrección de errores; la segunda usa códigos de detección de errores.
Para
entender la manera en que pueden manejarse los errores es necesario estudiar de
cerca lo que es en realidad un error. Normalmente, un marco consiste en mbits
de datos (es decir, n = m + r). A una unidad de n bits que contiene datos y
bits de comprobación se le conoce como palabra código de n bits.
Dadas
dos palabras código cualesquiera, digamos 10001001 y 10110001, es posible
determinar cuántos bits correspondiente difieren. En este caso, difieren tres
bits. Para determinar la cantidad de bits diferentes basta aplicar una
operación OR EXCLUSIVO a las dos palabras código y contar la cantidad de bits 1
en el resultado. La cantidad de posiciones de bit en la que difieren dos
palabras de código se llama distancia de HAMMING (Hamming 1950). Su significado
es que, si dos palabras código están separadas una distancia de Hamming d, se
requerirán d errores de un bit para convertir una en la otra.
En
la mayoría de las aplicaciones de transmisión de datos, todos los 2 EXP m
mensajes de datos posibles son legales, pero debido a la manera en que se
calculan los bits de comprobación no se usan todas las 2 EXP n palabras código
posibles. Dado el algoritmo de cálculo de los bits de comprobación, es posible
construir una lista completa de palabras código legales y, en esta lista,
encontrar las dos palabras código cuya distancia de Hamming es mínima. Esta
distancia es la distancia de Hamming de todo el código.
Las
propiedades de detección y corrección de errores de un código dependen de su
distancia de Hamming. Para detectar d errores se necesita un código con
distancia d + 1, pues con tal código no hay manera de que d errores de un bit
puedan cambiar una palabra código válida a otra. Cuando el receptor ve una
palabra código no válida, sabe que ha ocurrido un error de transmisión. De
manera parecida, para corregir d errores se necesita un código de distancia 2d
+ 1, pues así las palabras código legales están tan separadas que, aun con d
cambios, la palabra código original sigue estando más cercana que cualquier
otra palabra código, por lo que puede determinarse única.
Como
ejemplo sencillo de códigos de detección de errores, considere un código en el
que se agrega un solo bit de paridad a los datos. El bit de paridad a los
datos. El bit se escoge de manera que la cantidad de bits 1 en la palabra
código sea par (o impar). Por ejemplo, cuando se envía 10110101 con paridad par
añadiendo un bit al final, se vuelve 101101011, pero 10110001 se vuelve
101100010 con paridad par. Un código con un solo bit de paridad tiene una
distancia de 2, pues cualquier error de un bit produce una palabra código con
la paridad equivocada. Este sistema puede usarse para detectar errores
individuales.
Como
ejemplo sencillo de código de corrección de errores, considere un código con
sólo cuatro palabras código válidas:
0000000000,
0000011111, 1111100000 y 1111111111.
Este
código tiene una distancia de 5, lo que significa que puede corregir errores
dobles. Si llega la palabra código 0000000111, el receptor sabe que el original
debió ser 0000011111. Sin embargo, si un triple error cambia 0000000000 a
0000000111, el error no se corregirá adecuadamente.
Imagine
que queremos diseñar un código con m bits de mensaje y r bits de comprobación
que permitirá la corrección de todos los errores individuales. Cada uno de los
2 EXP m mensajes legales requiere n + 1 patrones de bits dedicados a él. Dado
que la cantidad de patrones de bits es de 2 EXP n debemos tener (n+1)2 EXP m
<= 2 EXP n. Usando n = m + r, este requisito se vuelve (m + r + 1) <= 2
EXP r . Dado m, esto impone un límite inferior a la cantidad de bits de
comprobación necesarios para corregir errores individuales.
De
hecho, este límite inferior teórico puede lograrse un método debido a Hamming
(1950). Los bits de la palabra código se numeran consecutivamente, comenzando
por el bit 1 a la izquierda. Los bits que son potencias de 2(1,2,4,8,16, etc.)
son bits de comprobación. El resto (3,5,6,7,9,etc.) se rellenan con los bits de
datos. Cada bit de comprobación obliga a que la paridad de un grupo de bits,
incluyendo a él mismo, sea par (o impar). Un bit puede estar incluido en varios
cálculos de paridad. Para ver a que bits de comprobación contribuye el bit de
datos en la posición k, rescriba k como una suma de potencias de 2. Por
ejemplo, 11 = 1 +2 +8 y 29 = 1 + 4 + 8
+ 16. Se recomienda un bit solamente por los bits de comprobación que ocurren
en su expansión (por ejemplo, el bit 11 es comprobado por los bits 1, 2, y 8).
Al
llegar una palabra código, el receptor inicializará a cero un contador y luego
examina cada bit de comprobación, k (k= 1,2,4,8,...) para ver si tiene la
paridad correcta. Si no, suma k al contador. Si el contador es igual a cero
tras haber examinado todos los bits de comprobación (es decir, si todos fueron
correctos), la palabra código se acepta como válida. Si el contador es
diferente de cero, contiene el número del bit incorrecto. Por ejemplo, si los
bits de comprobación 1,2 y 8 tienen errores, el bit invertido es el 11, pues es
el único comprobado por los bits 1,2 y 8. En la figura se muestra algunos
caracteres ASCII de 7 bits codificados como palabras código de 11 bits usando
el código de Hamming. Recuerde que los datos se encuentren en las posiciones de
bit 3,5,6,7,9,10 y 11.
|
Carácter |
ASCII |
Bits de
comprobación |
|
H |
1001000 |
00110010000 |
|
a |
1100001 |
10111001001 |
|
m |
1101101 |
11101010101 |
|
m |
1101101 |
11101010101 |
|
i |
1101001 |
01101011001 |
|
n |
1101110 |
01101010110 |
|
g |
1100111 |
11111001111 |
|
|
0100000 |
10011000000 |
|
c |
1100011 |
11111000011 |
|
o |
1101111 |
00101011111 |
|
d |
1100100 |
11111001100 |
|
e |
1100101 |
00111000101 |
|
|
Orden de
Transmisión de bits. |
|
Los códigos de Hamming sólo pueden corregir errores individuales. Sin embargo, hay un truco que puede servir para que los códigos de Hamming corrijan errores en ráfaga. Se dispone como matriz una secuencia de k palabras código consecutivas, con una palabra código por fila. Normalmente se transmitiría una palabra código a la vez, de izquierda a derecha . Para corregir los errores en ráfaga, los datos deben transmitirse una columna a la vez, comenzando por la columna de la extrema izquierda. Cuando todos los bits k han sido enviados, se envían la segunda columna, y así sucesivamente. Cuando el marco llega al receptor, la matriz se reconstruye, una columna a la vez. Si ocurre un error de longitud k, cuando mucho se habrá afectado 1 bit de cada una de las k palabras código; sin embargo, el código de Hamming puede corregir un error por palabra código; sin embargo, el código de Hamming puede corregir un error por palabra código, así que puede restaurarse la totalidad del bloque. Este método usa kr bits de comprobación para inmunizar bloques de km bits de datos contra una sola ráfaga de errores de longitud k o menos.
Código de detección de errores.
Los
códigos de corrección de errores a veces se utilizan para la transmisión de
datos; por ejemplo, cuando el canal es simplex, por lo que no pueden solicitarse retransmisiones. Sin embrago,
con mayor frecuencia se prefiere la detección de errores seguida de la
retransmisión porque es más eficiente. Como ejemplo simple, considere un canal
en el que los errores son aislados y la tasa de errores es de 10 EXP –6 por
bit. Sea el tamaño de bloque 1000 bits. Para proporcionar corrección de errores
en bloques de 1000 bits se requieren 10 bits de comprobación; un megabit de
datos requerirá 10,000 bits de comprobación. Para detectar un solo bloque con 1
bit de error, basta con un bit de paridad por bloque. Por cada 1000 bloques se
tendrá que retransmitir un bloque extra (1001 bits). El gasto extra del método
de detección de errores + retransmisión es de solo 2001 bits por megabit de
datos, contra 10,000 bits con un código de Hamming.
Si
se agrega un solo bit de paridad a un bloque y el bloque viene muy alterado por
una ráfaga de errores prolongada, la probabilidad de que se detecte el error es
de 0.5 , lo que difícilmente es
aceptable. Puede mejorarse mucho la probabilidad considerando a cada bloque por
enviar como una matriz rectangular de n bits de ancho y k bits de alto. Se
calcula por separado un bit de paridad para cada columna y se agrega a la
matriz como última fila. La matriz se transmite entonces fila por fila. Al
llegar el bloque, el receptor comprueba todos los bits de paridad. Si
cualquiera de ellos está mal, solicita la retransmisión del bloque.
Este
método puede detectar una sola ráfaga de duración n, pues sólo se cambiará un
bit por columna. Sin embargo, una ráfaga de duración n+1 pasará sin ser
detectada si se invierte el primer bit, el último bit y todos los demás bits
están mal; sólo implica que cuando menos el primero y el último están mal.) Si
el bloque está muy alterado por una ráfaga continua o por accidente, la paridad
correcta es de 0.5, por lo que la probabilidad de aceptar un bloque alterado
cuando no se debe es de 2 EXP –n.
Aunque
el esquema anterior puede ser adecuado en algunos casos, en la práctica se usa
otro método muy difundido: el código polinómico se basa (también conocido como
código de redundancia cíclica o código CRC) Los códigos polinómicos se basan en
el tratamiento de cadenas de bits como representaciones de polinomios con
coeficientes de un polinomio con k que van de x EXP k-1 a x EXP 0. Se dice que
tal polinomio es de grado k-1 . El bit mayor (más izquierdo) es el coeficiente de x EXP (k-1) , el
siguiente bit es el coeficiente de x EXP (k-2) y así sucesivamente. Por
ejemplo, 110001 tiene 6 bits y por tanto representa un polinomio de seis
términos con coeficientes 1,1,0,0,0 y 1 : x EXP 5 + x EXP 4 + x EXP 0.
La
aritmética polinómica se hace módulo 2, de acuerdo con las reglas de la teoría
de campos algebraicos. No hay acarreos para la suma, ni préstamos para la
resta. Tanto la suma como la resta son idénticas a un OR EXCLUSIVO. Por
ejemplo:
|
10011011 |
00110011 |
11110000 |
01010101 |
|
+11001010 |
+11001101 |
-10100110 |
-10101111
|
|
----------------- |
------------------ |
----------------- |
----------------- |
|
01010001 |
11111110 |
01010110 |
11111010 |
La
división se lleva a cabo de la misma manera que en binario, excepto que la
resta se hace módulo 2, igual que antes. Se dice que un divisor “cabe” en un
dividendo si el dividendo tiene tantos bits como el divisor.
Control de errores
Un
circuito de comunicación de datos puede ser tan corto, de unos cuantos pies o,
tan largo, de varios miles de millas; el medio de transmisión puede ser tan
sencillo, como pedazo de cable o, tan complejo, como un sistema de microondas,
satélite o fibra óptica. Por lo tanto, debido a las características, no ideales
que están asociadas con cualquier sistema de comunicación, es inevitable que
ocurran errores y es necesario desarrollar e implantar procedimientos para el
control de errores. El control de errores puede dividirse en dos categorías
generales: Detección de errores y Corrección de errores.
Detección de errores
La detección de errores es simplemente el proceso de monitorear la información recibida y determinar cuando un error de transmisión ha ocurrido. Las técnicas de detección de errores no identifican cual bit (o bits) es erróneo, solamente indica que ha ocurrido un error. El propósito de la detección de errores no es impedir que ocurran errores, pero previene que los errores no detectados ocurran. Como reacciona un sistema a los errores de transmisión, depende del sistema y varía considerablemente. Las técnicas de detección de errores más comunes usados para los circuitos de comunicación de datos son: Redundancia, Codificación de cuenta exacta, Paridad, Chequeo de redundancia vertical y Longitudinal, y Chequeo de redundancia cíclica.
Redundancia.- La
Redundancia involucra transmitir cada carácter dos veces. Si el mismo carácter
no se recibe dos veces sucesivamente, ha ocurrido un error de transmisión. El
mismo concepto puede usarse para los
mensajes. Si la misma secuencia de caracteres no se recibe dos veces
sucesivamente, en exactamente el mismo orden, ha ocurrido un error de
transmisión.
Codificación de cuenta
exacta.- Con la codificación de cuenta exacta, el número de unos, en
cada carácter, es el mismo. Cada carácter tiene tres unos en el y, por lo
tanto, una cuenta sencilla de la cantidad de unos recibidos, en cada carácter,
determina si ha ocurrido un error de transmisión.
Paridad.- La
paridad es probablemente el esquema de detección de error, mas sencillo, usado
para los sistemas de comunicación de datos y se usa con cheque de redundancia
vertical y horizontal. Con la paridad, un solo bit (llamado bit de paridad) se
agrega a cada carácter para forzar el total de números unos en el carácter,
incluyendo el bit de paridad, para que sea un numero impar (paridad impar) o un
numero par (paridad par). Por ejemplo, el código ASCII para la letra “C” es 43
hex o P1000011 binario, con el bit P representando el bit de paridad. Hay tres
unos en el código, no contando el bit de paridad. Si se usa la paridad impar,
el bit P se hace un 0, manteniendo el número total de unos en tres, un número
impar. Si se usa la paridad par, el bit P se convierte en 1 y el número total
de unos es cuatro, un número par.
Observando
más de cerca la paridad, puede verse que el bit de paridad es independiente del
número de ceros en el código y no es afectado por pares de unos. Para la letra
“C”, si todos los bits 0 se descartan, el código de P1_____11. Para la paridad
impar, el bit P, aun es un 0 y para la paridad par, el bit P aun es un 1. Si
los pares de unos, también se excluyen, el código es o P1_______, P______1, o
P_____1_. Nuevamente, para la paridad impar, el bit P es un 0, y para la
paridad par, el bit P es un 1.
La
definición de paridad es equivalencia o igualdad. Una compuerta lógica que
determina cuando todas sus entradas son iguales, es la compuerta XOR. Con una
compuerta XOR, si todas las entradas son iguales (ya sea todos ceros o todos
unos) la salida es un 0. Si todas las entradas son iguales no son iguales, la
salida es un 1. Esencialmente, ambos circuitos pasan por un proceso de
comparación eliminando los ceros y pares de unos. El circuito utiliza una
comparación secuencial (serial), mientras que el circuito utiliza una
comparación combinada (paralela). Con el generador de paridad b0 usa XOR con b1, la salida usa XOR con b2,
etc. La salida de la última operación XOR se compara con un bit polarizado. Si se desea la paridad par, el
bit polarizado se convierte en 0 lógico. Si se desea la paridad impar, el bit
polarizado se hace 1 lógico La salida del circuito es el de paridad, el cual se
agrega al código de caracteres. Con el generador de paridad paralelo, las
comparaciones se hacen en capas o niveles. Los pares de bits (b0 y b1,
b2 y b3, etc.) usan XOR. Los resultados de las salidas
XOR de primer nivel se utilizan entonces juntos. El proceso continua, hasta que
solo un bit permanece, el cual usa XOR con el bit polarizado. Nuevamente, si se
desea la paridad par, el bit polarizado se hace 0 lógico y si se desea la
paridad impar, el bit polarizado se hace 1 lógico.
Un
chocador de paridad usa el mismo procedimiento que un generador de paridad,
excepto que la condición de lógica de la ultima comparación se usa para
determinar si una violación de paridad ha ocurrido (para la paridad impar un 1
indica un error y un 0 indica que no hay error; para la paridad par, un 1
indica un error y un 0 indica que no hay error).
La
ventaja principal de la paridad es la simplicidad. La desventaja es que cuando
un numero par de bits se recibe erróneamente, el checador de paridad no lo
detendrá (o sea, si las condiciones de
lógica de 2 bits se cambian, la paridad permanece igual). Consecuentemente, la
paridad en un periodo largo de tiempo, detectara solos el 50% de los errores de
transmisión (esto asume una probabilidad igual, que un numero de bits, par o
impar, podría estar en error).
Comprobación de paridad.-
El esquema mas sencillo para detectar errores consiste en añadir un BIT
de paridad al final del bloque de datos. (Por ejemplo si hay un número par de
BITS 1, se le añade un BIT 0 de paridad y si son impares, se le añade un BIT 1
de paridad). Un ejemplo típico es la transmisión de caracteres, en la que se
añade un BIT de paridad por cada carácter IRA de 7 BITS. El valor de este BIT
se determina de tal forma que el carácter resultante tenga un numero impar de
unos (paridad impar) o un numero par (paridad par). Así por ejemplo si el
transmisor esta transmitiendo una G en IRA (1110001) y se utiliza paridad
impar, se añadirá un 1 y se transmitirá 11100011. el receptor examina el
carácter recibido y , si el numero total de unos es impar supondrá que no ha
habido errores. Si un BIT o cualquier numero impar de BITS se invierte
erróneamente durante la transmisión entonces el receptor detectara un error.
Nótese que si dos o cualquier numero par de BITS se invierten debido a un
error, aparecerá un error no detectado. Generalmente, se utiliza paridad par
para la transmisión síncrona y paridad impar para la asíncrona. La utilización de BITS de paridad no es
infalible, ya que los impulsos de ruido son a veces lo suficientemente largos
como para destruir mas de un BIT, especialmente a velocidades de transmisión
altas. Pero puede ocurrir que el propio BIT de paridad sea
cambiado por el ruido o incluso que más de un BIT de datos sea cambiado , con
lo que el sistema de detección fallará .
Chequeo de redundancia vertical y
horizontal.- El Chequeo de redundancia vertical (VRC), es un esquema de
detección de errores que usa la paridad para determinar si un error de
transmisión ha ocurrido dentro de un carácter. Por lo tanto, el VRC a veces se
llama paridad de carácter. Con el
VRC, cada carácter tiene un bit de paridad agregado a el, antes de la
transmisión. Puede usar paridad par o impar. El ejemplo mostrado bajo el tema
“paridad” involucrando el carácter de ASCII “C”, es un ejemplo de cómo se usa
el VRC.
El
chequeo de redundancia horizontal y longitudinal (HRC o LRC), es un esquema de
detección de errores que utiliza la paridad para determinar si un error de
transmisión ha ocurrido en un mensaje y, por lo tanto, a veces es llamado
paridad de mensaje. Con el LRC cada posición de bit tiene un bit de paridad. En
otras palabras, b0 de cada carácter en el mensaje usa XOR con b0 de
todos los demás caracteres en el mensaje. De manera semejante, b1, b2,
y así sucesivamente, utilizan XOR con sus bits respectivos de todos los demás
caracteres en el mensaje. Esencialmente, el LRC es el resultado de usar XOR con
los caracteres que componen un mensaje, mientras que el VRC es el uso de XOR en
los bits con un solo carácter. Con el LRC, solo la paridad par será usada.
La
secuencia del bit en el LRC se calcula en el transmisor, antes de enviar la
información, después se transmite como si fuera el último carácter del mensaje.
En el receptor, LRC se recalcula en los datos y el LRC recalculado se compara
con el LRC transmitido con el mensaje. Si son iguales, se asume que ningún
error de transmisión ha ocurrido. Si son diferentes, un error de transmisión
debe haber ocurrido. El ejemplo siguiente muestra como el VRC y el LRC son
determinados.
EJEMPLO:
Determine
el VRC y el LRC para el siguiente mensaje codificado ASCII: THE CAT (el gato).
Utilice la paridad impar para el VRC y paridad par para el LRC.
SOLUCION
|
Carácter |
|
T |
H |
E |
Sp |
C |
A |
T |
LRC |
|
Hex |
|
54 |
48 |
45 |
20 |
43 |
41 |
54 |
2F |
|
LSB |
b0 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
|
|
b1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
|
Código |
b2 |
1 |
0 |
1 |
0 |
0 |
0 |
1 |
1 |
|
ASCII |
b3 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
|
|
b4 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
|
b5 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
|
MSB |
b6 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
0 |
|
VRC |
b7 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
El
LRC es 2FH o 00101111 binario. En ACII, este es el carácter /.
El
bit VRC para cada carácter se calcula en dirección vertical y los bits del LRC
se calculan en dirección horizontal. Este es el mismo esquema que fue usado con
las primeras cintas de papel para teletipo y tarjetas de perforación y
subsecuentemente en las aplicaciones de comunicación de datos actuales.
El
grupo de caracteres que componen el mensaje (es decir, el gato) a menudo se
llama bloque de información. Por lo
tanto, la secuencia del bit para el LRC frecuentemente se llama carácter de chequeo de bloque (SCC) o
una secuencia de chequeo de bloque
(BCS). El BCS es mas apropiado, porque el LRC no tiene función como un carácter
(o sea, no es un carácter alfa/numérico, grafico o enlazado con datos); el LRC
es simplemente una secuencia de bits
usada para la detección de errores.
Históricamente,
LRC detecta entre 75% y 98% de todas las transmisiones de errores. El LRC no
detectara errores de transmisión cuando un número par de caracteres tienen un
error en la misma posición del bit. Por ejemplo, si b4 en dos diferentes caracteres esta en error, el LRC
aun es valido, aunque hayan ocurrido múltiples errores de transmisión.
Si
los VRC y LRC se usan simultáneamente, la única vez que un error no se detecta
es cuando un numero par de bits, en un numero par de caracteres, estuviera en
un error y las mismas posiciones del bit, en cada carácter, están en error, lo
cual no es muy probable que suceda. El VRC no identifica cual bit esta en error
en un carácter, y el LRC no identifica
cual carácter tiene un error en el. Sin embargo, para los errores de bit
sencillo, el VRC usado junto con el
LRC, identifica cual bit esta en un
error. De otra manera, los VRC y LRC solo identifican que un error ha ocurrido.
Revisión de redundancia
cíclica.- Probablemente, el esquema más confiable para la detección de
errores es el chequeo de redundancia cíclica (CRC). Con CRC, aproximadamente el
99.95% de todos los errores de transmisión
se detectan. El CRC se usa generalmente con códigos de 8 bits, tales
como EBCDIC o códigos de 7 bits, cuando no se usa paridad. Dado un bloque
o mensaje de k-BITS, el transmisor
genera una secuencia de n-BITS
denominada secuencia de comprobación de la trama FCS (Frame Check Secuence), de
tal manera que la trama resultante con n+
k BITS sea divisible por algún numero predeterminado. El receptor entonces
dividirá la trama recibida por ese numero y si no hay residuo en la división se
supone que no ha habido errores. Este
proceso puede hacerse bien por software o bien por un circuito hardware (mas
rápido).
En
E.U., el código Cremas común es el CRC-16, el cual es idéntico al estándar
internacional, CCITT V.41. Con el CRC-16, se utilizan 16 bits para el BCS.
Esencialmente, el carácter CRC es el sobrante de un proceso de división. Un
mensaje de datos polinomico G(x) se divide por una función de polinomico del
generador P(x), el cociente se descarta, y el residuo se trunca en 16 bits y se
agrega al mensaje como el BCS. Con la generación de CRC, la división no se
logra con un proceso de división aritmética estándar. En vez de usar una resta
común, el residuo se deriva de una operación de XOR. En el receptor, el flujo
de datos y el BCS se dividen por la misma función de generación P(x). Si ningún
error de transmisión ha ocurrido, el residuo será cero. El polinomio generado para CRC-16 es
P(x) = x16 + x12
+ x5 + x0
En
donde x0 = 1
El
número de bits en el código CRC es igual al exponente más alto del polinomio
generado. Los exponentes identifican las posiciones del bit que contiene un 1.
Por lo tanto, b16, b12, y b0 son todos unos y
todas las demás posiciones de bits son ceros.
La
Fig. muestra el diagrama a bloques para un circuito que genera un CRC-16 BCS,
para el estándar CCITT V.41. Observe que para cada posición de bit del
polinomio generado es donde hay un 1 se coloca una compuerta excepto por x0.
Ejemplo
13-2
Determine
el BCS para los siguientes polinomios generadores de datos y CRC.
Datos G(x) = x7 + x5 + x4 +
x2 + x1 + x0 o 10110111
CRC P(x) = x5
+ x4 + x1 + x0 o 110011
Solución: Primero G(x) es multiplicado por el número
de bits en el código CRC, 5.
x5 (x7 + x5 + x4
+ x2 + x1 + x0) = x12 + x10
+ x9 + x7+ x6 + x5 = 1011011100000
Después
divida el resultado por P(x)
11010111
110011| 1011011100000
110011
111101
110011
111010
110011
100100
110011
101110
110011
111010
110011
01001 = CRC
El
CRC se agrega a los datos para dar el siguiente flujo de datos transmitido.
G(x) CRC
10110111 01001
En
el receptor, los datos transmitidos son nuevamente divididos por P(x).
11010111
110011| 1011011100001
110011
111101
110011
111010
110011
100110
110011
101010
110011
110011
110011
000000 = residuo = 0
Ningún error ocurrido
Corrección de errores
Esencialmente,
hay tres métodos de corrección de errores: Sustitución de símbolos,
Retransmisión y Seguimiento de corrección de un error.
Sustitución de Símbolos.- La sustitución de símbolos se diseño para usarse en un
ambiente humano: en donde hay un ser humano, en la terminal de recepción, para
analizar los datos recibidos y tomar decisiones sobre su integridad. Con la
sustitución de símbolos, si un carácter se recibe en error, en vez de
revertirse a un nivel superior de corrección de errores o mostrar el carácter
incorrecto, un carácter único que es indefinido por el código de caracteres,
tal como un signo de interrogación invertido (؟), se sustituye por el
carácter malo. Si el carácter erróneo no puede distinguirse por el operador, la
retransmisión es para llamada (o sea, la sustitución de símbolos es una forma
de retransmisión selectiva). Por ejemplo, si el mensaje “Nombre” tenia un error
en el primer carácter, se mostraría como “؟ombre”. Un operador puede
discernir el mensaje correcto por inspección, y la retransmisión no es
necesaria. Sin embargo, si el mensaje “$؟,000.00” se recibiera, un
operador no podría determinar el carácter correcto y la retransmisión seria
requerida.
Retransmisión.- Es volver a enviar un mensaje, cuando es recibido en error,
y la terminal de recepción automáticamente pide la retransmisión de todo el
mensaje. La retransmisión frecuentemente se llama ARQ, el cual es un término
antiguo de la comunicación de radio, que significa petición automática para retransmisión. ARQ es probablemente el
método más confiable de corrección de errores, aunque no siempre es el más
eficiente. Las dificultades en el medio de transmisión ocurren en ráfagas. Si
se usan mensajes cortos requieren de más reconocimientos y regresos de línea
que los mensajes largos. Los reconocimientos y regresos de línea para el
control de errores so formas de encabezamientos
(caracteres diferentes a los datos que se deben transmitir). Con los mensajes
largos, menos tiempo de regreso es necesario, aunque la probabilidad de que un
error de transmisión ocurra es mayor que para los mensajes cortos. Se puede
mostrar, de manera estadística, que los bloques de mensajes entre 256 y 512
caracteres son de tamaño óptimo, cuando se utiliza ARQ para corrección de
errores.
Seguimiento de corrección de error.-
El Seguimiento de corrección de error (FEC), es el único esquema de
corrección de error que detecta y corrige los errores de transmisión, del lado
receptor, sin pedir retransmisión.
Con
FEC, se agregan bits al mensaje, antes de la transmisión. Un código de
corrección de errores popular, es el código
de Hamming, desarrollado por R.W. Hamming, en los laboratorios Bell. El
número de bits en el código de Hamming depende del número de bits en el
carácter de datos. El número de bits de Hamming que debe agregarse a un
carácter se determina de la siguiente expresión:
2n ≥ m + n + 1
En
donde: n = numero de bits de
Hamming m = numero de bits en el
carácter de datos
Ejemplo
13-3
Para
una cadena de datos de 12-bits de 101100010010, determine el número de bits de
Hamming requerido, coloque arbitrariamente los Bits de Hamming en la cadena de
datos, determine la condición de cada bit de Hamming, asuma un error de
transmisión de bit sencillo arbitrario y compruebe que el código de Hamming detectara
el error.
Solución: Sustituyendo en la ecuación, el numero de
bits de Hamming es
2n ≥ m + n + 1
para
n = 4:
24 = 16 ≥ m + n + 1 = 12 + 4 + 1 = 17
16
< 17; por lo tanto, 4 bits de hamming son insuficientes.
Para
n = 5:
25 = 32 ≥ m + n + 1 = 12 + 5 + 1 = 18
32 > 18; por lo tanto, 5 bits de Hamming son insuficientes para llenar el criterio de la ecuación. Por lo tanto, un total de 12 + 5 = 17 bits componen el flujo de datos.
Coloque
arbitrariamente 5 bits de Hamming en el flujo de datos:
17 16
15 14 13 12 11
10 9 8 7 6
5 4 3 2 1
H 1 0
1 H 1 0 0 H
H 0
1 0 H 0 1 0
Para
determinar la condición lógica de los bits de Hamming, exprese todas las
posiciones de bit que contienen un 1, como un numero binario de 5 bits y usando
XOR juntos.
|
Posición
de bit |
Numero
binario |
|
|
2 |
00010 |
|
|
6 |
00110 |
|
|
XOR |
00100 |
|
|
12 |
01100 |
|
|
XOR |
01000 |
|
|
14 |
01110 |
|
|
XOR |
00110 |
|
|
16 |
10000 |
|
|
XOR |
10110 |
= Código de Hamming |
El
flujo de datos codificados de 17 bits se convierte en
|
H |
|
|
|
H |
|
|
|
H |
H |
|
|
|
H |
|
|
|
|
1 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
Asuma
que durante la transmisión, un error ocurre en la posición de bit 14. El flujo
de datos recibido es
1 1 0 0
0
1 0 0 1 1
0 1 0 0 0 1 0
En
el receptor, para detreminar el bit en error, extraiga los bits de Hamming y
usando XOR con el código binario para cada posición de bit de datos que
contiene un 1.
|
Posición
de bit |
Numero
binario |
|
|
Código de Hamming |
00010 |
|
|
2 |
00110 |
|
|
XOR |
10100 |
|
|
6 |
00110 |
|
|
XOR |
10010 |
|
|
12 |
01100 |
|
|
XOR |
11110 |
|
|
16 |
10000 |
|
|
XOR |
01110 |
= binario 14 |
La
posición de bit 14 fue recibida en error. Para arreglar el error, simplemente
complemente el bit 14.
El
código de Hamming descrito aquí, detectara solo errores de un solo bit. No se
puede usar para identificar errores de bits múltiples o errores en los bits de
Hamming. El código de Hamming, como todos los códigos FEC, requiere de la
adición de los bits a los datos, alargando consecuentemente el mensaje
transmitido. El propósito de los códigos FEC es reducir o eliminar el tiempo
gastado de retransmisiones. Obviamente, se negocia entre ARQ y FEC, y los
requerimientos del sistema determinan que método es mejor para un sistema en
particular. El FEC frecuentemente se usa para transmisiones sencillas a muchos
receptores, cuando los reconocimientos no son prácticos.
Deteccion y correccion de errores
Una
de las metas mas importantes en el diseño de transmisión de datos es reducir al
mínimo el error; la tasa de error se define como la relación entre la cantidad
de bits que se reciben incorrectamente contra el total de bits que se
transmite. En muchos circuitos de datos el objetivo de diseño es lograr que la
tasa de error sea menor a un error 1x105 (se expresa frecuentemente
como 1x10-5 ) y para los circuitos telegráficos, un error en 1x104.
El
método para reducir al mínimo la tasa de error es tener un canal de transmisión
“perfecto”, que no introduzca errores en la información que se transmite hasta
la salida del receptor. Sin embargo, no se puede lograr este canal perfecto.
Además de la mejora en los parámetros mismos del canal de transmisión, la tasa
de error se puede reducir mediante ciertas formas de redundancia sistemática.
En el antiguo código Morse se enviaban dos veces las palabras sobre un circuito
defectuoso, lo cual es redundancia en su forma más simple. Naturalmente, se
tomaba el doble de tiempo para enviar el mensaje, además de que no es rentable
si se compara la cantidad de palabras útiles que se reciben por minuto contra
la ocupación del canal.
Lo
siguiente ilustra el compromiso entre la redundancia y la eficiencia del canal:
La redundancia se puede incrementar a un grado tal que la tasa de error se
acerque a cero, pero la transferencia de información o eficiencia sobre el
canal también se aproximara a cero. En consecuencia, la redundancia que no sea
sistemática es un desperdicio y reduce únicamente la tasa de comunicación útil.
Por otro lado, se puede obtener la máxima eficiencia en el sistema de
transmisión digital si de la corriente de bits se transmite se elimina la
redundancia y otros elementos de código como son los de “arranque” y “fin”, los
bits de paridad y otros bits de “encabezado”. Obviamente hay un compromiso
entre costo y beneficio en algún punto entre la máxima eficiencia sobre un
circuito de datos y la redundancia que se añade sistemáticamente.
Eficiencia.- La Eficiencia en un canal de datos expresa la cantidad de
datos que pasan a través de el. El término es la medida de los datos útiles que pasan a través del enlace de
comunicación, estos datos se pueden usar directamente en una computadora o ETD
(equipo terminal de datos).
De
lo anterior se concluye que la eficiencia en un circuito especifico varia con
la tasa base de datos, se e relaciona con la tasa de error y el tipo de error
que se encuentra (ya sea en ráfaga o aleatorio) y varia de acuerdo con el tipo
de sistema de detección y corrección de errores que se usa, el tiempo para
manejar el mensaje y la longitud del bloque a partir del cual se toman los bits
de encabezados como son los de paridad, banderas, verificaciones de redundancia
cíclicas, etc.
Naturaleza de los Errores.- En la transmisión de datos, un error es un bit que no se
recibe correctamente. Por ejemplo, se transmite “1” en un cierto espacio de
tiempo, pero el elemento que se recibe en tal espacio de tiempo se interpreta
como “0”. Los errores en los bits se presentan tanto en la forma de errores
aleatorios únicos o como en ráfaga de errores. Por ejemplo, las descargas
eléctricas u otra forma de ruido de pulsos ocasionan frecuentemente ráfagas de
errores en las que muchos de los bits contiguos presentan gran cantidad de bits
erróneos. El IEEE define la ráfaga de errores como “un grupo de bits en el que
dos bits sucesivos con error están separados por una cantidad de bits correctos
que es inferior a una cantidad establecida”.
Definición de detección y
corrección de errores.- La detección
de errores indica que símbolo se recibe con error. La paridad se usa
principalmente para la detección de errores; sin embargo, los bits de paridad
añaden redundancia y, en consecuencia, se reduce la eficiencia del canal.
La
corrección de errores repara el error que se detecta. Básicamente existen dos
tipos de técnicas para la corrección de errores: la que actúa hacia adelante
(CEA) y la bidireccional [solicitud automática de repetición (SAR)]; en este
último sistema se usa un canal de retorno (canal hacia atrás). Cuando se
detecta un error, el receptor lo indica al transmisor sobre el canal hacia
atrás y se transmite de nuevo el bloque* de información que contiene el error.
En la corrección de errores con acción hacia adelante (CEA) se utiliza un tipo
de codificación que solo permite una cantidad limitada de errores para su
corrección en el extremo receptor mediante logística (software) o circuiteria
(hardware) que se implanta en ambos extremos.
Existen
varios arreglos o técnicas disponibles para la detección de errores. Todos los
métodos para la detección de errores implican alguna forma de redundancia como,
por ejemplo, los bits o secuencias adicionales para informar al sistema la
presencia de algún o algunos errores. La paridad de carácter tiene como inconveniente
su debilidad. Generalmente los ingenieros de sistemas de datos se refieren a
tal paridad como verificación de redundancia vertical (VRV).
En
otra forma detección de errores se utiliza la verificación de redundancia
longitudinal (VRL), la cual se usa en la transmisión por bloques, en la que un
mensaje consta de uno o más bloques. Recuerdese que un bloque es un grupo
especifico de dígitos o caracteres de datos que se envían como “paquete”. El
carácter VRL, que se conoce también como CVB o carácter de verificación de
bloque, se añade al final de cada bloque. El CVB verifica la cantidad total de
“1” y “0” en las columnas de bloque (verticalmente). En el extremo receptor se
suman los “1” (o los “0”) del bloque según la convención de paridad en el
sistema; si la suma no coincide con el CVB existe un error (o errores) en el
bloque, *El “bloque” es el grupo de dígitos (caracteres de datos) que se
transmiten como una sola unidad sobre la cual se aplica generalmente un
procedimiento de codificación con fines de sincronía y control de error.
Con
la VLR se mejora mucho el problema de los errores que no se detectan y que
pueden escapar a la VRV si se usa sola; sin embargo, el método VRL no es a
prueba de errores, ya que usa el mismo razonamiento que el VRV. Supóngase que
ocurre un error de manera que se sustituyen dos “1” por dos “0” en las
posiciones del segundo y tercer bits de los caracteres “1” y “3” de un cierto
bloque. En este caso, el CVB se lee correctamente en el extremo receptor y el
error escapa también a la VRV. Obviamente, en un sistema en el que se usa la
VRL y la VRV es mas difícil que pasen los errores sin detectar que en uno en
que solo se use una verificación. Un método mas efectivo para la detección de
errores es la VRC, la cual se basa en un código cíclico y se usa en la
transmisión por bloques con un CVB. En este caso, el CVB que se transmite
representa el residuo de la división del bloque de mensaje entre un “polinomio
generador”. Matemáticamente, el bloque
de mensaje se puede tratar como una función, por ejemplo:
anXn + an-1Xn-1
+ an-2Xn-2 + …..+ a1X + a0
donde
los coeficientes se ajustan para que representen un número binario. Considérese
el número binario 11011, el cual se representa de manera polinómica:
|
1 |
1 |
0 |
1 |
1 |
|
a4 |
a3 |
a2 |
a1 |
a0 |
y
se convierte en:
X4 + X3 + X + 1
o
considérese este otro ejemplo:
|
0 |
1 |
1 |
0 |
1 |
|
a4 |
a3 |
a2 |
a1 |
a0 |
que
se convierte en:
X3 + X +
1
El
carácter VRC se usa como el CVB y es el residuo del polinomio de datos cuando
se divide entre el polinomio generador. Entonces, si el polinomio de datos D(X)
se divide entre el polinomio generador G(X), resulta un cociente Q(X) y un
residuo R(X) polinomicos, o:
D(X) = Q(X) + R(X)
G(X) G(X)
En la mayoría de las
aplicaciones, la longitud del carácter VRC es de 16 bits o dos bytes de 8 bits.
En la actualidad se usan generalmente tres polinomios generadores estándar:
1.
VRC-16 (ANSI): X16 + X15 + X5 + 1
2.
VRC (CCITT) : X16 + X5 + 1
3.
VRC-12: X12 + X11 + X3 + 1
Naturalmente,
si al comparar la cantidad del CVB en el extremo receptor es diferente a la del
CVB del extremo transmisor existe un error (o errores) en el bloque que se
recibe.
En
la referencia 34 se establece que la VCR-12 proporciona detección de errores de
ráfagas de hasta 12 bits de longitud y, adicionalmente, de pueden detectar
hasta el 99.955% de ráfagas de error con longitud hasta de 16 bits. La VCR-16
proporciona detección de ráfagas de hasta 16 bits de longitud y una detección
adicional del 99.955% de ráfagas de error con longitud mayor a los 16
bits. En todo sistema de transmisión habrá ruido, independientemente
de cómo haya sido diseñado. El ruido dará lugar a errores que modificaran uno o
varios bits de la trama.
Cuanto mayor es la trama que se transmite, mayor es
la probabilidad de que contenga algún error. Para detectar errores, se añade un
código en función de los bits de la trama de forma que este código señale si se
ha cambiado algún BIT en el camino Este código debe de ser conocido e
interpretado tanto por el emisor como por el receptor.
Los errores en las troncales
digitales son raros pero son comunes en la transmisión inalámbrica. Las probabilidades en términos de los
errores en las tramas transmitidas se definen como sigue:
Pb: probabilidad de un BIT erróneo, también denominada
tasa de error por BIT VER (BIT Error Rate).
P1: probabilidad de que una trama llegue sin errores.
P2: probabilidad de que una trama llegue con uno o mas
errores no detectables.
P3: probabilidad de que una trama llegue con uno o mas
errores detectables pero sin errores indetectables.
Primero se toma el caso en el que no
se toman medidas para detectar errores. En ese caso, la probabilidad de errores
detectables P3 es cero.
Para calcular las otra probabilidades se supondrá que todos los BITS tienen una probabilidad de error Pb constante,
independientemente de donde estén situados en la trama.
Entonces se tiene que:
P1 = (1-Pb)F F:
numero de BITS por trama
P2 = 1-P1
 En otras palabras, la probabilidad de que una trama llegue sin
ningún BIT erróneo disminuye al aumentar la probabilidad de que un BIT sea
erróneo; además, la probabilidad de que una trama llegue sin errores disminuye
al aumentar la longitud de la misma; cuanto mayor es la trama, mayor numero de
BITS tendrá, y mayor será la probabilidad de que alguno de los BITS sea
erróneo.
En otras palabras, la probabilidad de que una trama llegue sin
ningún BIT erróneo disminuye al aumentar la probabilidad de que un BIT sea
erróneo; además, la probabilidad de que una trama llegue sin errores disminuye
al aumentar la longitud de la misma; cuanto mayor es la trama, mayor numero de
BITS tendrá, y mayor será la probabilidad de que alguno de los BITS sea
erróneo.
Dada una trama de BITS se añaden
BITS adicionales por parte del transmisor para formar un código con capacidad
de detectar errores. Este código se calculara en función de los otros BITS que
se vayan a transmitir. El receptor realizara el mismo calculo y comparara los
dos resultados. Se detectara un error si y solamente si los dos resultados
mencionados no coinciden. Por tanto, P3
es la probabilidad de que la trama que contenga errores y el sistema los
detecte. P2 se denomina
tasa de error residual, y es la probabilidad de que no se detecte un error
aunque se este usando un esquema de detección de errores.
En algunos medios (por ejemplo, el radio) los
errores ocurren en grupos (en vez de
individualmente). Un grupo inicia y termina con bits invertidos, con algún
subconjunto (posiblemente nulo) de los bits intermedios también invertidos.
Un CODEWORD de n BITS consiste
en un conjunto de m BITS de datos y r BITS de redundancia o chequeo.
Corrección de errores con acción
hacia delante.- En la corrección de errores con acción adelante (CEA) se
utilizan ciertos códigos binarios que se diseñan para corregir por si mismos
los errores que introduce el medio de transmisión que se utiliza. Con esta
forma de corrección de error en la estación receptora se pueden reconstruir los
mensajes que contengan error.
Los
que se usan en la CEA se dividen en dos amplias clases: Códigos de bloque y
Códigos convulcionales. En los códigos de bloque se toman k bits de información
cada vez y se añaden c bits de paridad, la verificación se hace sobre las
combinaciones de los k bits de información; un bloque consta de n = k + c
dígitos; el código consta de k palabras, cada una con n dígitos de extensión.
Cuando se usan para transmisión de datos, los códigos de bloque pueden ser
sistemáticos. Un código sistemático es aquel en que los bits de información
ocupan las primeras k posiciones del bloque y los siguen (n-k) dígitos de
verificación.
Otro
código de bloque es el código de grupo en el que la suma en modulo 2 de dos
palabras cualesquiera de n bits del código es otra palabra del mismo. La suma
en modulo 2 se denota por el símbolo + y consiste en la suma binaria sin el
“acarreo”, o sea que 1 + 1 = 0, sin llevar 1; cuando se suman 10011 y 11001 en
modulo 2 el resultado es 01010.
La
distancia mínima de sobre seguridad
(Hamming) es la medida de la capacidad de un código para detectar y
corregir errores. Esta “distancia” es la cantidad mínima de dígitos en la que
difieren dos palabras codificadas. Por ejemplo, para detectar un error de E
dígitos se necesita que el código tenga la distancia mínima de sobreseguridad
de (E+1); para corregir un error de E dígitos la distancia mínima de
sobreseguridad del código debe ser (2E+1). Un código cuya distancia de
sobreseguridad es de 4 puede corregir un solo error y detectar dos dígitos con
error.
El
código de convulsión (convulcional) es otra forma de codificar que se usa para
detección y corrección de errores. Como su nombre lo indica, es un código que
se enrolla o se convulsiona sobre otro, es decir, es la convulción de una
corriente de datos de entrada y la función de respuesta de un codificador.
Generalmente, el codificador esta compuesto por registros de corrimiento y se
usan sumadores en modulo 2 para verificar los dígitos, cada uno de los cuales
es función binaria de un subconjunto particular de los dígitos de información
del registro de corrimiento.
La
función de error se puede mejorar mediante el uso de un microprocesador en el
decodificador; la decisión entre marca o espacio no es tan estricta o
irrevocable, más bien se le conoce como decisión “suave”. En este caso, se
añade una etiqueta de 3 bits a cada digito que se recibe para indicar en el
demodulador el nivel de confiabilidad de la decisión antes de procesar; después
del procesamiento, cuando se indican los errores, se cambian los bits con el
nivel mas bajo de confiabilidad de 0 a 1 o de 1 a 0, según sea el caso.
Los
códigos que se estudiaron hasta este punto son efectivos para detectar y
corregir errores aleatorios que se deben exclusivamente a las perturbaciones
del ruido Gaussiano blanco aditivo y a la limitación en la potencia de la
señal. En muchos circuitos de transmisión se encuentran ráfagas de ruido en las
que los disparos de ruido exceden en duración a 1 o 2 bits. Naturalmente, una
manera de combatir este ruido es prolongar la duración del bit. Sin embargo,
tales ráfagas pueden tener una duración de 10 a 100 ms y los “disparos” se
deben típicamente al ruido de impulsos.
El
código Hagelberger es un código de corrección de errores con acción adelante
para combatir con eficacia las ráfagas de error. Para usar este código se deben cumplir dos requisitos: La
longitud de la ráfaga no debe ser de más de 8 bits y debe haber al menos 91
dígitos correctos entre ráfagas, pero se reduce la eficiencia al 75% o, dicho
en otras palabras, se añade redundancia con lo que 1 de cada 4 es de
verificación.
Corrección de errores con canal
de retroalimentación.- La corrección de errores bidireccional o con retroalimentación
se usa ampliamente en los circuitos actuales de datos y sobre algunos
telegráficos; esta forma de corrección de errores se conoce como SAR. Las
siglas se derivan de la antigua señal Morse y telegráfica “solicitud automática
de repetición” (automatic repeat request). En la mayoría de los sistemas de
datos modernos se usa la transmisión en bloque; este tiene la longitud
conveniente de caracteres para su envío como entidad; la longitud “conveniente”
es una importante consideración. La cantidad “conveniente” se relaciona con la
tarjeta “IBM” estándar de 80 columnas; con 8 bits por columna es conveniente un
texto de datos en un bloque de 8 x 80 o 640 bits, de manera que se pueda
transmitir una tarjeta IBM por cada bloque. De hecho, existe un sistema en
operación, el Autodin, que basa la longitud de su bloque en tal criterio,
siendo estos de 642 bits de largo. Los bits que exceden los 640 se usan para
encabezado y verificación.
La
longitud óptima del bloque es un compromiso entre la longitud del bloque y la
tasa de error o la cantidad de repeticiones que se espera tener del bloque
sobre un circuito particular. En los bloques largos se tiende a amortizar mejor
los bits de encabezado, pero son eficientes cuando la tasa de error es alta.
Bajo tales condiciones los bloques tienden a retener el circuito a causa de los
periodos largos de retransmisión.
La
CEA se basa en el concepto de transmisión por bloque. Cuando en el receptor se
detecta un error se solicita la repetición del bloque de que se trate a la
estación transmisora; la solicitud se hace a través de un canal de “retroalimentación” que puede estar
dedicado especialmente a tal propósito o mediante el lado de retorno de un
enlace duplex completo. En el canal de retorno dedicado, la velocidad es generalmente
baja, por lo común de 75 bps, mientras que en el canal hacia adelante puede ser
de 2400 bps o mayor.
Bibliografía
-Sistemas de Comunicaciones Electrónicas, Wayne Tomasi.
Páginas 512-528.
-Redes de Computadoras, Tanenbaum.
Páginas 184-190.
-Ingeniería de Sistemas de Telecomunicaciones, Freeman.
Páginas 381-391.